2025年取材
「動き」を操り 人と自動マシンが共生できる社会へ
応用理工学科 機械工学科目 機械動力学領域
石川 将人 教授
制御工学を通して、人間と機械が共生できる未来を
自律的に動き回るさまざまな機械や器具、そしてロボットが、社会に溶け込み人々の暮らしを支えている——そんな未来を全力で追いかけているのが、工学部応用理工学科の石川将人教授だ。 専門は、数学や力学をもとにした制御理論やロボティクス。石川研究室では、生物の動きに学びながら、しなやかに動くロボットの原理を探る一方で、建設機械事業で国内トップシェアを誇るコマツと協働し、自律的に働く建設機械の開発にも挑戦。 「面白い研究」と「役に立つ研究」を両輪に、数式で“動き”を描き、実際の実験現場でその理論を確かめる。 生物と機械、理論と実験、数理とものづくり。異なる世界をつなぐ研究で、未来の社会を動かそうとしている。
ロボコンサークルを目指して大学進学!
石川教授は子供の頃から算数が得意でコンピューターの世界にのめり込み、中学生になる頃には本から得た知識で機械語のプログラミングに勤しむほどの熱中ぶりだった。今でこそ制御工学という「動き」の研究者だが、意外にも当時は動くものに無関心だったという。
そんな石川教授と「動き」を結びつけるきっかけが訪れる。それが、当時放送が始まったばかりのNHKロボコンとの出会いだ。さまざまなアイディアが、学生たちの手によって組み上げられて、現実の世界でロボットの動きとして表現される。石川教授は「モノを動かす」世界に急速に引き込まれていった。
「ロボコンサークルを目指して東京工業大学(現、東京科学大学)工学部に進学しました。子どもの頃の好奇心がまっすぐ進路に繋がっていった感じです。実際のサークル活動では、他のメンバー達のものづくり能力のあまりの高さに絶望したりもしましたが、研究室に入ってからは、自ら考えた理論が、目の前でロボットの動きとして実現する面白さの虜になりました。数学という切り口からロボットにアプローチする方法もあるんだということに気づきました。」
そんな石川教授の数学と力学による制御理論に「生物」という要素が加わったのは、ロンドン留学中の経験がきっかけだった。「少なくとも高校時代は生物に1ミリの興味もなかった(笑)。それが、留学中に数式一辺倒の研究に行き詰まったとき、大学の隣にあった科学博物館や自然史博物館(入場無料)にふらっと入って恐竜の化石を見たり、BBCで「アッテンボローの生命ドキュメンタリー」シリーズを観たりするうちに、それまで世界の半分を見過ごしてきたことに気づいたんです。その後は、制御理論の研究でも実在の生物を意識するようになりました」
世の中の生物にはない形状のロボットを動かす
幼少期から学生時代の経験をもとに、石川教授の研究は、ありとあらゆる「動くもの」を対象とするようになる。そのベースとなっているのが制御理論、つまり数式だ。下の写真のようなロボットを見たことがあるだろうか。「三叉ヘビロボット」と呼ばれるこのロボットは、放射状に伸びた三本の足先に車輪のついた構造だ。自然界では見たことのないこの形状は、既に知られていたヘビ型ロボットの推進原理に、非線形制御理論を組み合わせて生み出されたものだ。
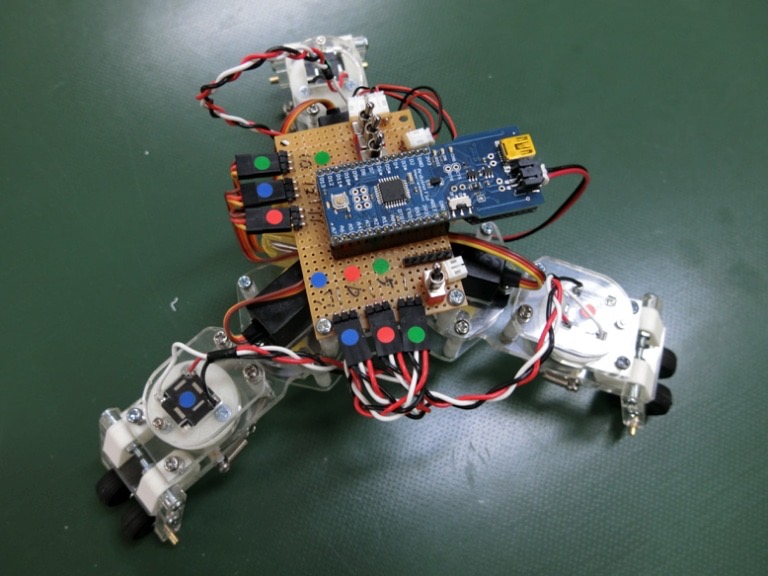
三叉ヘビロボット
「このロボットができたのは、とある抽象的な数式の制御理論を研究していたとき、これは何か特殊な形のヘビ型ロボットを表しているんじゃないか、と考えたのがきっかけです。頭で考えた制御理論に基づき、当時の学生さんが多彩な動きを実現してくれました。」
このように生物の観察をもとに理論を考察し、それをクラフトマンシップで組み上げる。そんなプロセスを通じて、思ってもみなかった動きをみせる「ここにしかないロボット」を石川教授は生み出し続けている。
生物のしくみを徹底的に調べる
「ロボティクス」と聞くと、コンピューターを搭載した機械にプログラミングすることで思い通りに動かすというイメージを持つのではないだろうか。しかし石川研究室では、増田容一助教を中心に、もっと自由な発想で研究を進めている。
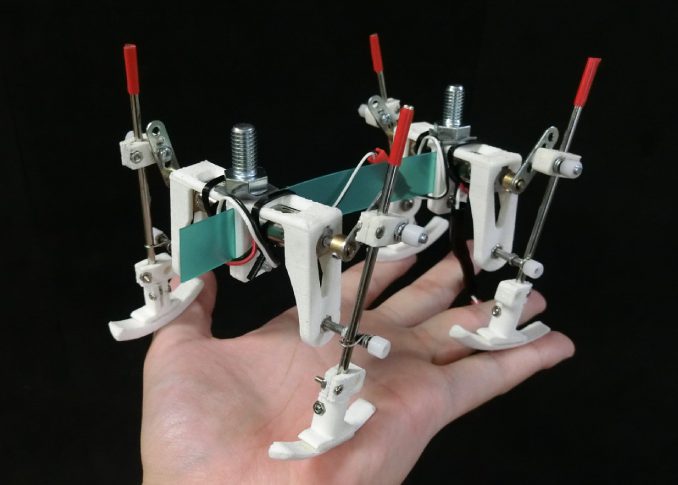
無脳ロボット
例えば、増田助教の発案による通称「無脳ロボット」には、名前の通り脳(つまり、コンピューター)が搭載されていない。リンククランク機能と反力の理論を用いて、四脚動物と同じ運動パターンを生み出し、しかも入力電圧に応じて歩き方を切り替えることができる。石川教授曰く「モノを動かすためにそもそもコンピューターは必要なのでしょうか。頭で考えすぎず、身体に大部分を委ねる「弱い制御」を理解して応用することで、これまでのロボットに使われていた複雑な制御が不要になるかもしれません」
この観点から、石川研究室では「生物に学ぶ」ロボットの開発にも力を注いでいる。四足歩行の動物の身体に備わる制御機能を仔細に観察し、その神経の反射機構を従来の制御理論に落とし込むことで、ロボットはより生物らしく動くようになるのだ。また、石川研究室ではロボットの専門家である増田助教と動物学の専門家である武田特任助教がタッグを組んで研究しており、腱や骨格、筋肉、膜といった内部構造を徹底的に調べて、そこから学んだ知見をロボットの設計や制御に活かすアプローチがとられている。今は想像もできないが、まるで生き物のように機械が動き回る未来は、意外とすぐそこかもしれない。
阪大工学部学生の素晴らしいクラフトマンシップ
「眼」と「頭」と「手」を総動員することがモットーの石川研究室に訪れた人は、そこにあるロボットの数に驚くだろう。これらはすべて研究室メンバーたちがクラフトマンシップで一から作り上げたものだ。
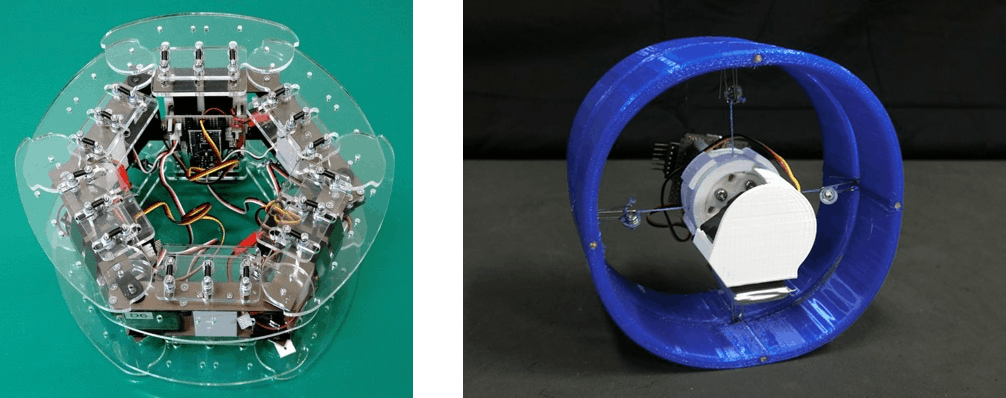
(左)可変形転がり移動ロボット (右)柔軟変形転がり移動ロボット
「阪大工学部の学生さんは凄いですよ。こんなの作ったら面白いよねとか、こうやったら動くはずだけどどう思うみたいなことを話すと、作ってみましたって持ってくるんですよ(笑)。モノづくりの能力が素晴らしく高い。私に無い部分なのでとても嬉しいです」
数学・力学一辺倒の理論志向であった石川教授の研究を大きく前進させたのは、「何でも試せる」、ここ阪大工学部なのである。

コマツとの協働研究でパワーショベルの自律化に挑む
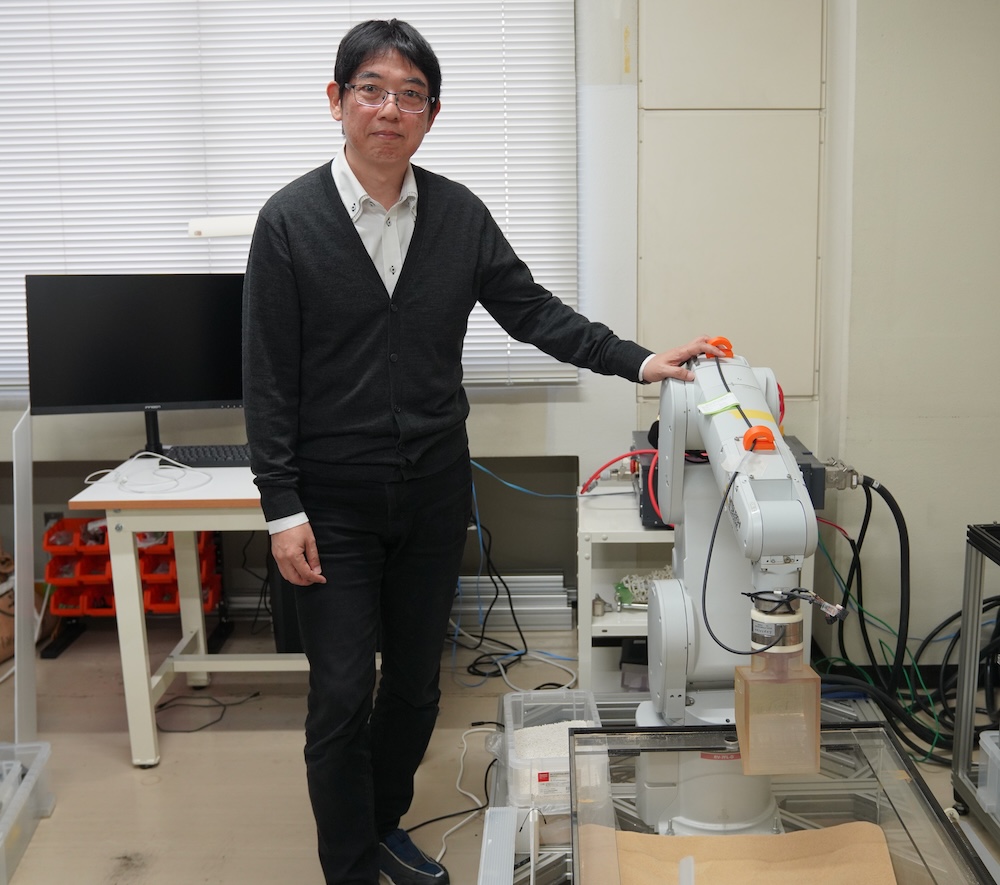
制御理論に基づく研究に加えて、石川教授はコマツみらい建機協働研究所の所長として、社会実装に近い「建築機械の遠隔化・無人化」という研究テーマにも取り組んでいる。協働研究所とは大学と企業の研究者が常に同じ屋根の下、協働で課題を探り社会実装のための研究を進める阪大キャンパス内に設置された研究機関のことだ。ここでも石川教授の好奇心にあふれた研究が進んでいる。
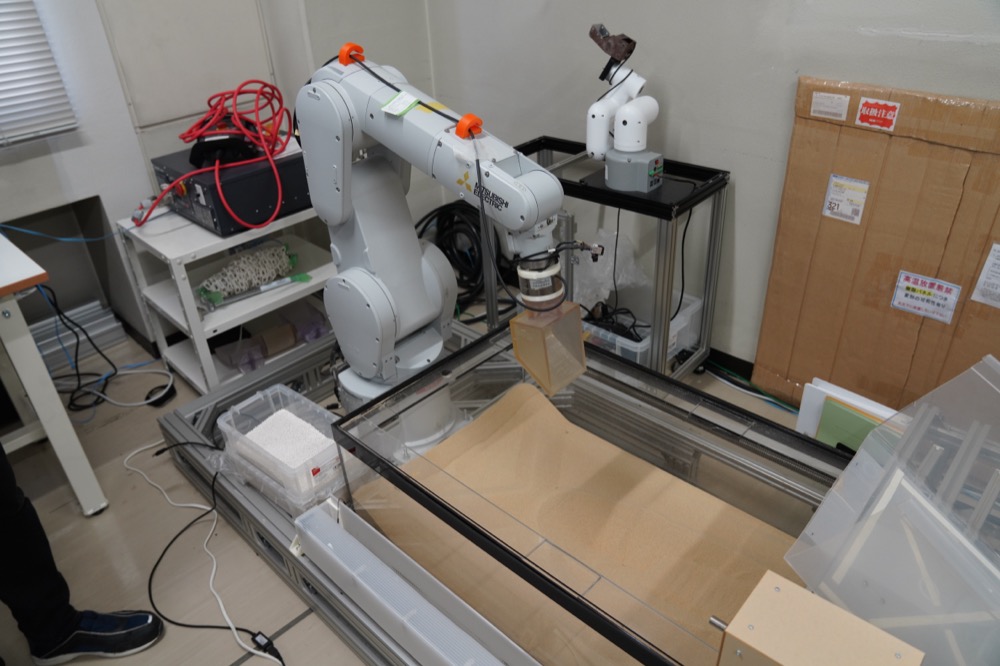
ショベルアーム実験装置
多種多様な「動くもの」を研究・検証してきた石川教授にとって、ショベルカーを思い通り動かすことは容易に実現可能かと思える。しかし、そう簡単なことではなかったようだ。「最初にコマツの方から、油圧ショベルを制御したいと言われたときに、ロボットの制御技術の研究が長かったので、これはできると思ったんですよ。ロボットアームと一緒だなと思ってやってみたら、全然そんなことなかったんですね。実験を進めるにつれ、大事なのはショベルを動かすことではなく、土砂を制御することだと気づきました。与えられる力によって、穴になったり、山になったり、平らになったりする土砂の挙動の理解が必要で、ショベルやアームの制御だけでは到底土砂を制御することはできなかったのです。機械の制御じゃなくて土砂の制御だと思った瞬間、今までやったことがないテーマだったので、めっちゃ研究が面白くなりました。」
「面白い研究」と「役に立つ研究」の両輪で
自身の知的好奇心から生まれる「面白い研究」と、労働人口減少、高齢化、技術承継の困難、作業の安全性確保などの社会課題解決に向けた「役に立つ研究」の両方を進めることで、新たな気付きを「面白がって」研究にのめり込む石川教授は笑顔で次のように語る。
「「面白い研究」と「役に立つ研究」は違うものに見えて、実はつながっているんです。面白い研究を真面目に面白がっていれば、いつかちゃんと社会の役に立てるし、役に立つ研究をずっと掘り下げていくと絶対面白い原理や新しい気付きがあるんです。なので、これからもこの両輪で学生さん達と楽しみながら研究を進めていきたいと考えています」

<石川教授つぶやきコラム>
ロボットアニメにも
さまざまな制御方法が・・・
「今から思えば、ロボットアニメの中にもいくつかの制御方法があります。ガンダムでは2本のレバーとペダルだけで4本の手足やスラスターまで吹いて動かしてる。多分、かなり自律的な動きの部分が多くて、アムロは抽象的な指示しかしてないはずです。その対極は勇者ライディーン。操縦室内の操縦者の運動がロボットの動きに反映される、リーダフォロワ型の制御系のように見えます。おまけに、ロボットが攻撃を受けると操縦者までダメージを受けちゃう(笑)。そこまで再現しなくてもいいのに・・・非常に忠実なシステムですね。ちなみに鉄人28号は、設定上はリモコン操作なのですが見るからに単純すぎるので、実は音声入力型で、今のプロンプトエンジニアリングに近いんじゃないかという気がします。「やっつけろ」と指令すると、やっつけてくれる」