実世界知能システム制御学領域
本研究室では、ロボティクス、メカトロニクス、制御理論、機械学習、大規模言語モデル(基盤モデル)などを駆使して社会に貢献する先進的な知能機械システム、ロボットシステムの学理・学術を探求します。最近では、建設機械システム、ドローンシステムの研究などに注力しています。本研究室では、数理的なアプローチと実験的なアプローチの双方を重視した研究スタイルを指向しています。

当研究室では,機械工学・情報科学・制御工学を融合した学際的アプローチにより,新たなシステム設計の地平を切り拓きます.多様な事象に対して,情報通信,最適化,生物模倣,自律分散論,AIなどの多角的視点からアプローチし,制御の本質を抽出して,革新的な機械システムの創出を追究します.産学官連携を通じて,モビリティ,ロボット,セキュリティ,エネルギーといった社会インフラ課題の解決を目指します.


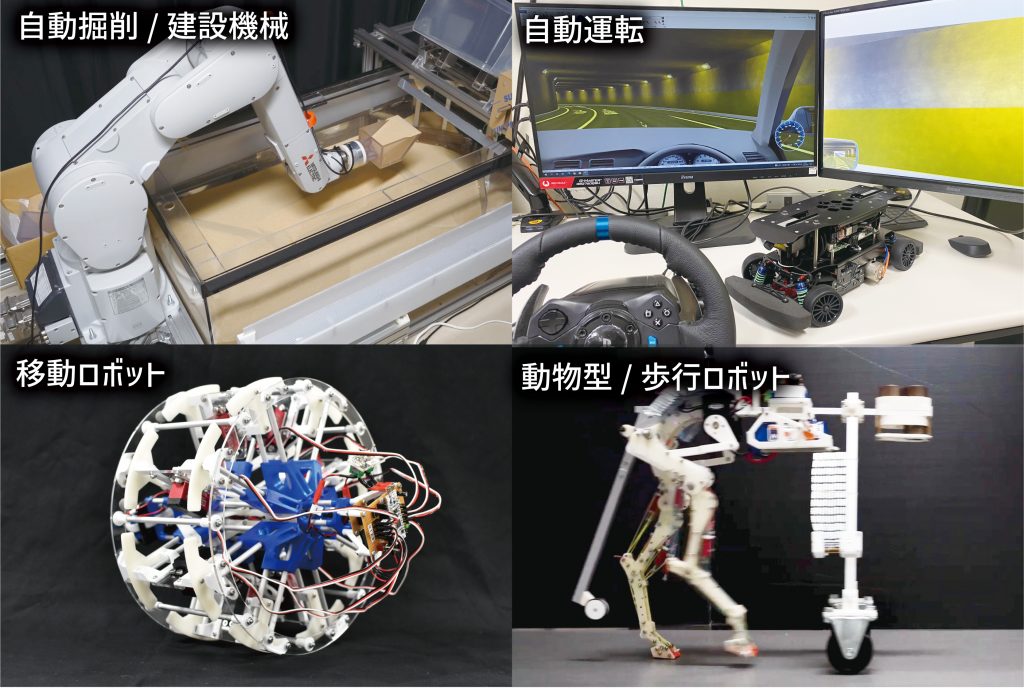
本研究室では、制御理論、ロボティクス・メカトロニクス,学習理論,力学系理論,生物学などを駆使して、徹底的に「動くもの」を探究します。最近ではロボットと生物のロコモーション,光によるナビゲーション,量子化制御系の設計,制御工学と機械学習の融合,建設機械の自動化研究などに注力しています.本研究室では数理的な思考と実験的研究の両方を重視し,バランスのとれた研究スタイルを指向しています.
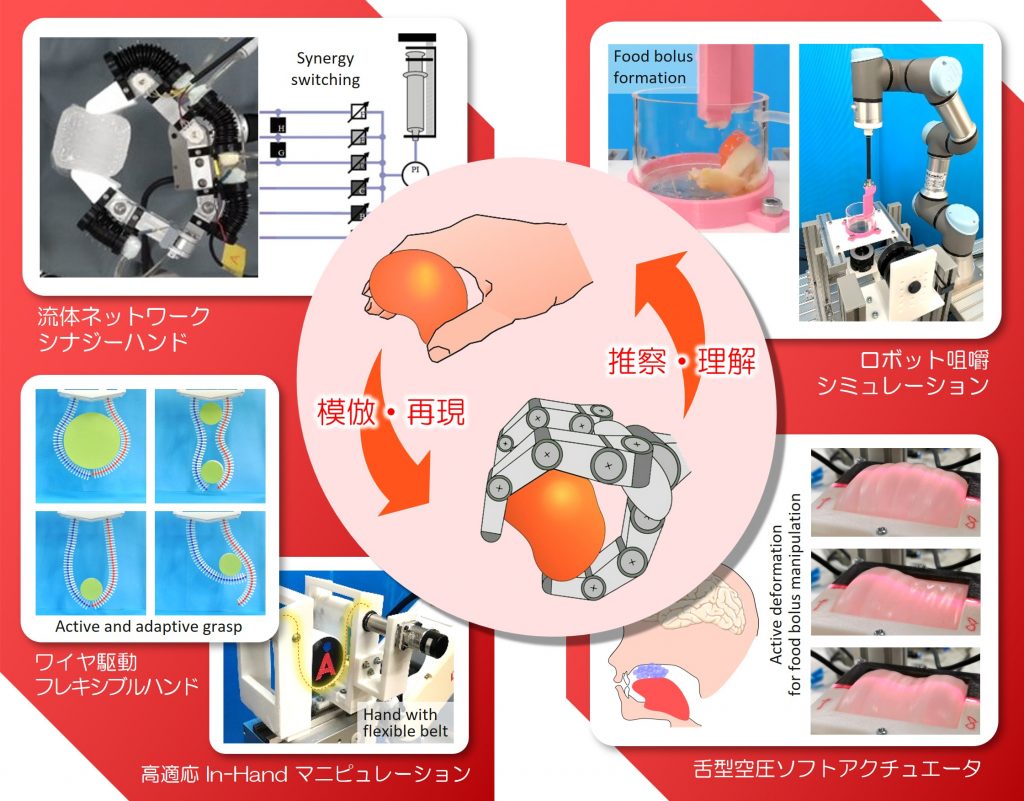
マニピュレーション(物体の操り)を中心としたロボティクス・メカトロニクスに関する挑戦的研究に取り組み,基礎理論と数値シミュレーション技術の開発,実機実験による検証に至るまでの独創的な学術体系の構築を目指しています.さらには,医歯学や食品科学と融合し,マニピュレーションならびにセンシングに関する新奇課題の創出,新奇システムの設計・実装論の構築に取り組んでいます.
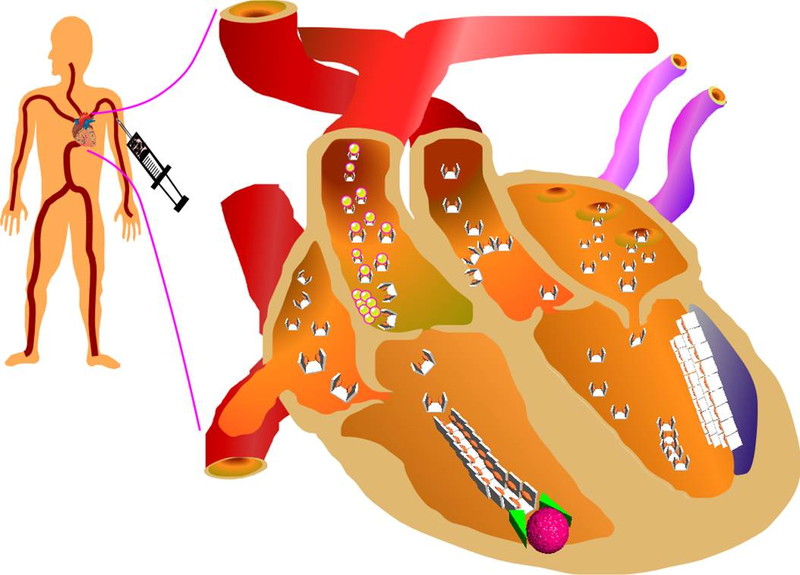
バイオアクチュエータ・MEMS・ラボオンチップ・マイクロナノメカトロニクス・再生医療・創発化学をキーワードに、多くの革新的な生命機械システムを発表してきました。機械とバイオと化学を融合した、全く新しい発想の柔らかい生命機械融合ウェットロボティクス、ソフトマシン、自律機械システムを世界に先駆けて発信することを目標に、教育と研究を行っています。
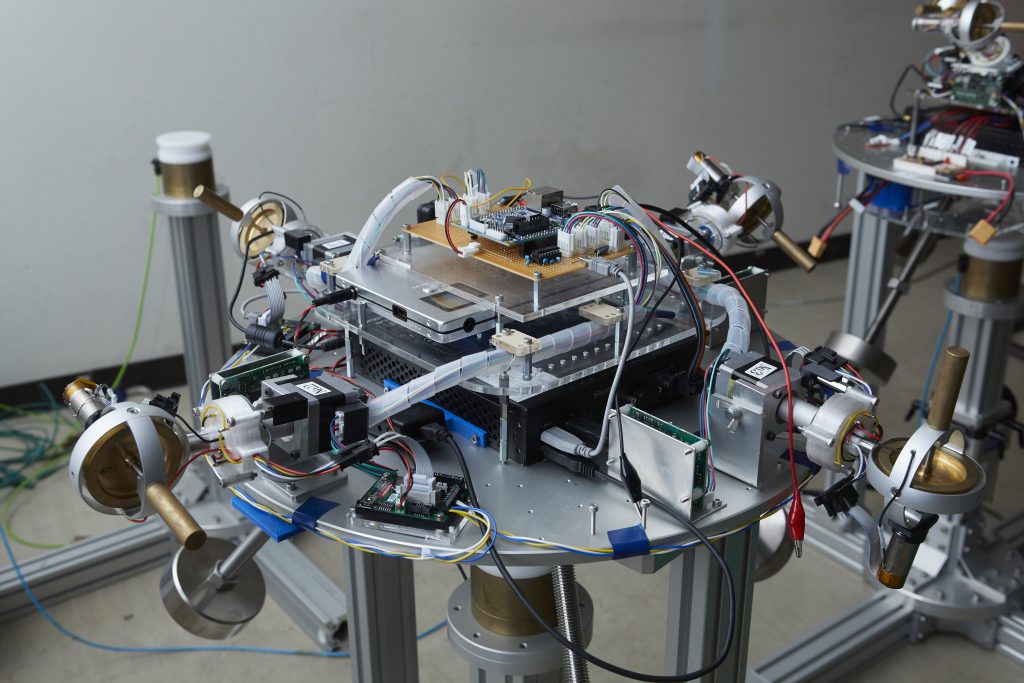
宇宙機の軌道運動や姿勢運動、気球の飛翔運動の力学解析を基にした運動の安定性や制御手法の研究を行っています。燃料補給が困難な宇宙機を軌道力学を利用して効率的に軌道制御する手法の開発や、コントロールモーメントジャイロのような角運動量を有するアクチュエータを用いる場合の高速な姿勢制御方法の開発、観測用気球の3次元運動のダイナミクス解析と姿勢制御方法の開発などを、理論、実験、実機開発を通して行っています。
Top