Real-World Intelligent Systems Control
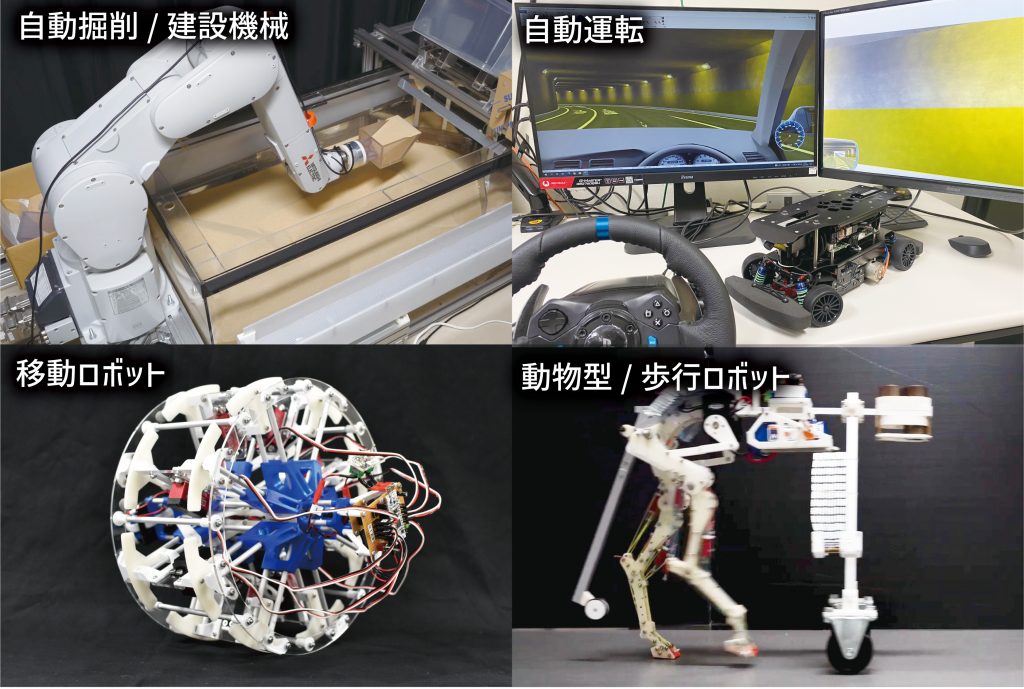
Our laboratory explores the scholarly foundations and underlying principles of advanced intelligent mechanical and robotic systems that contribute to society, by leveraging robotics, mechatronics, control theory, machine learning, and artificial intelligence. In recent years, we have placed particular emphasis on research in construction machinery systems and drone systems. We pursue a research style that values both mathematical and experimental approaches.

Our laboratory aims to pioneer new frontiers in system design through an interdisciplinary approach that integrates mechanical engineering, information science, and control engineering. We tackle diverse phenomena from multiple perspectives, such as information and communication technologies, optimization, biomimetics, distributed systems, and artificial intelligence, to extract the essence of control and pursue the creation of innovative mechanical systems. Through collaborations among academia, industry, and government, we seek to address social infrastructure challenges in areas such as mobility, robotics, security, and energy.


Walk, Swim, Rock and Roll —. We exploit every aspect of “motion”, with full aid of deepest understanding in classical mechanics, dynamical system theory, nonlinear control, robotics, mechatronics, or even in zoology, linguistics, etc. Our recent interest is centered at the principle of locomotion, induced by contact constraint between the body and its environment. We equally put importance on unbiased observation, mathematical thinking and rapid manufacturing.
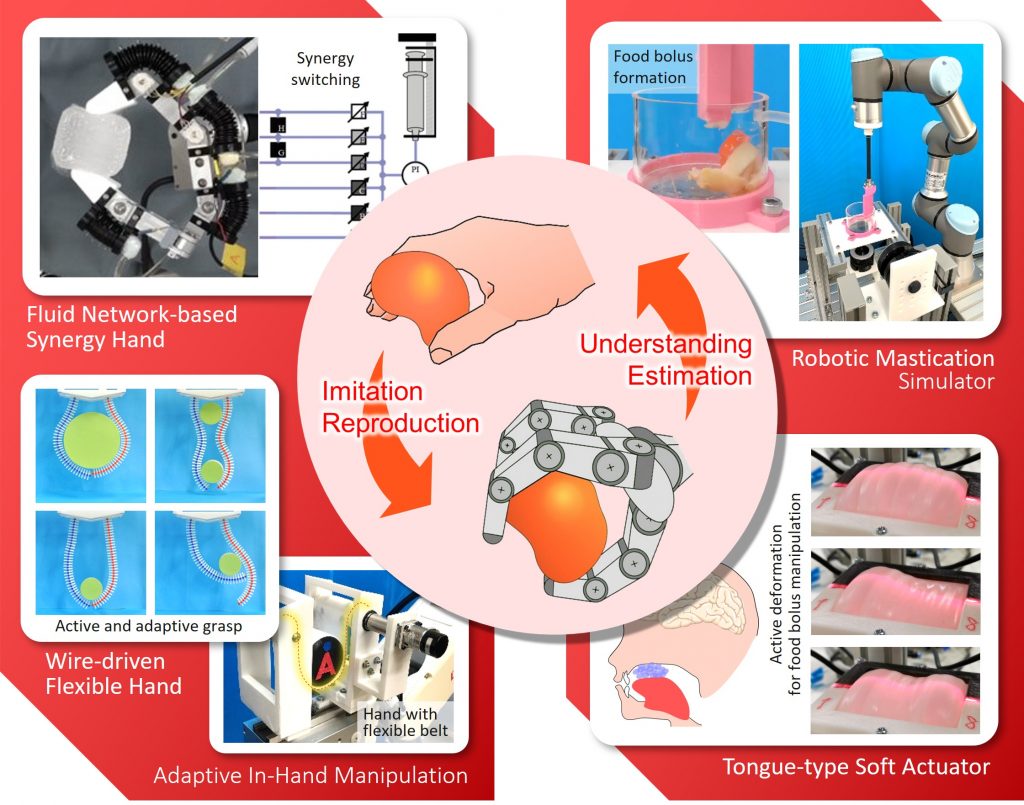
We conduct cutting-edge research in robotics and mechatronics, with a central focus on manipulation—the art of controlling and handling objects. Our aim is to establish a distinctive academic framework that spans fundamental theory, the development of numerical simulation techniques, and experimental validation with real-world systems.
In addition, through interdisciplinary collaboration with fields such as dentistry, and food science, we strive to explore unprecedented challenges and novel approaches in manipulation and sensing, ultimately developing theoretical foundations for system design and implementation.
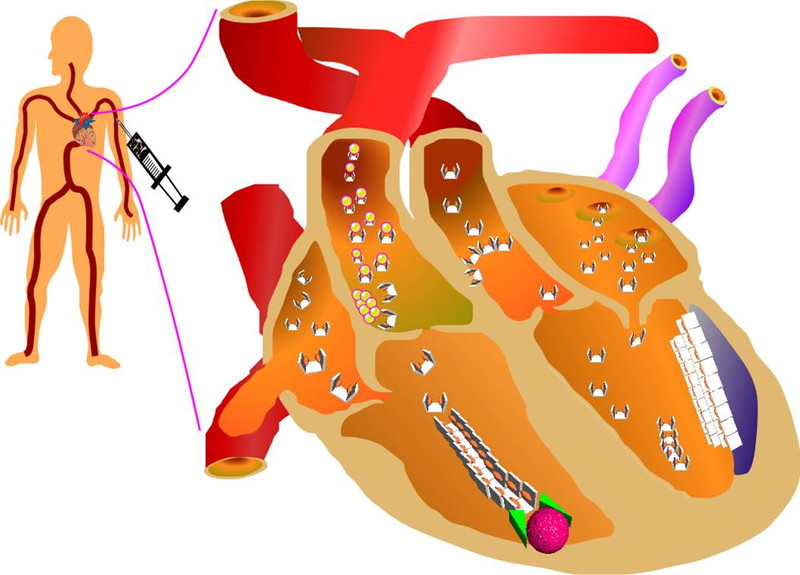
We have demonstrated an environmentally robust biotic-abiotic robotic system that uses living components, called “Cellular Build Up Wet Nano Robotics”. To utilize robust biological components as a functional systems and self assembly process and their emergent functionality, and to build up such a soft and wet machines will lead us an innovative fundamental change and produce a new principle and design to future man-made systems.
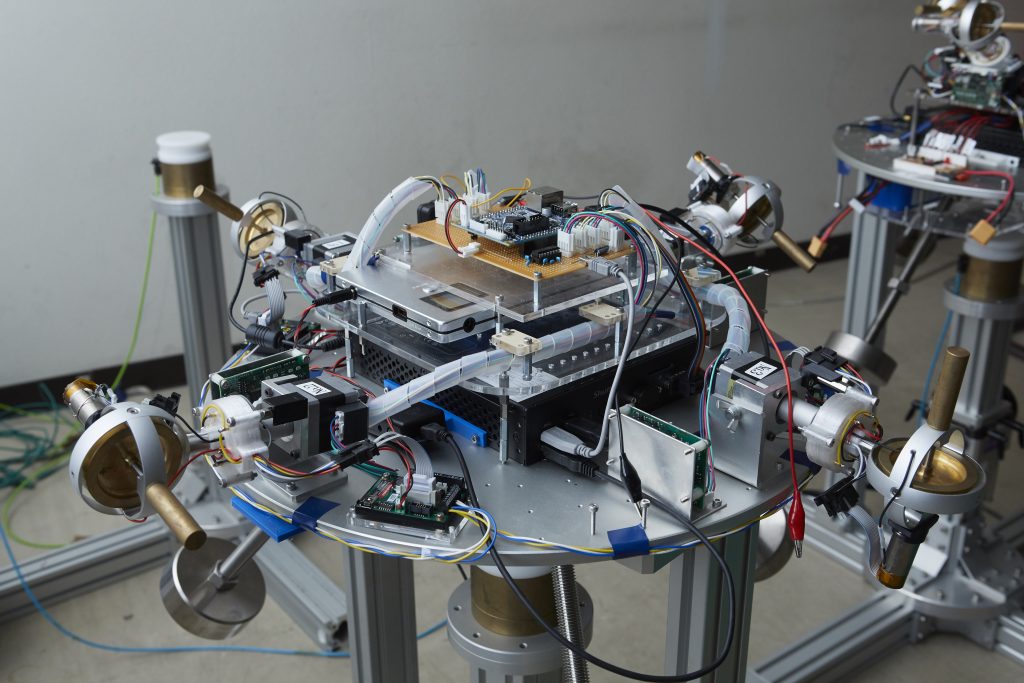
We are making research on the stability and control of spacecraft based on the spacecraft orbital and attitude dynamics and nonlinear control theory. We are developing an efficient orbital control and an agile attitude control of spacecraft using thrusters or control moment gyros.
Top